Commande de moteur CC MR132
Commande permettant de contrôler un moteur CC 2A dans les deux sens à partir d'une tension analogique, d'un signal RC ou d'une liaison I2C. Deux entrées pour capteurs de fin de course (non inclus) permettent d'arrêter le moteur en butée.
Alimentation: 7 à 24 Vcc
Consommation partie logique: 8 mA
Courant de sortie: 2 A (6 A en pointe)
Entrées/sortie: niveau logique TTL
Signal de commande:
- tension analogique 0 à 5 Vcc
- signal radio RC
- liaison I2C (deux adresses sélectionnables)
Dimensions: 33 x 33 x 15 mm
T° de service: 0 à +85°C
Référence Microbot: MR001-003.2

Méthode :
Nom : contrôleur de moteur facile V2. Code : MR001-003.2
L'Easy Motor Controller permet de contrôler le sens et la vitesse de rotation d'un DC moteur via trois entrées différentes :
analogique (potentiomètre),
radiocommande RC,
I2C numérique communication.
Son utilisation est très simple et le type d'entrée peut être sélectionné en appuyant simplement sur un bouton comme expliqué dans le instructions ci-dessous.
Pour optimiser la réponse aux commandes RC vous disposez également du calibrage fonction sur les signaux du récepteur.
Pour la communication I2C, il existe deux adresses esclaves différentes sélectionnables via un cavalier, et de cette façon il est possible d'utiliser deux Easy Motor Controller sur la même ligne série, et ensuite les contrôlant par un seul contrôleur externe.
En complétant les fonctions du tableau, il y a aussi la possibilité d'utiliser deux limites micro-interrupteurs, qui agiront comme une protection, en arrêtant le mouvement du moteur dans les deux directions possibles lorsque la pression du microswitch est détectée.
Dès que la carte est allumée, la led clignote 1, 2 ou 3 fois pour indiquer le type d'entrée sélectionnés, selon le modèle du tableau 1.
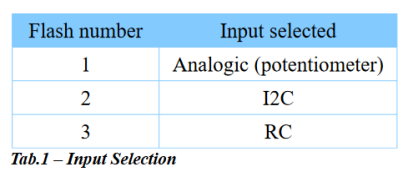
Si vous devez changer le type d'entrée, il suffira de maintenir enfoncée la touche PRG pendant un moment ; comme tant que le bouton est enfoncé, la LED clignotera 1, 2, 3 ou 4 fois puis elle clignotera de manière cyclique redémarrez avec 1 flash et ainsi de suite. En fonction du moment où le bouton PRG est relâché, vous pouvez définir le mode de saisie.
Si tu relâchez le bouton PRG après 1, 2 ou 3 flashs, la carte sera réglée respectivement sur entrée analogique ; communication I2C ou signal RC. Le mode de saisie sélectionné sera enregistré de manière permanente et, au prochain redémarrage de la carte, le dernier paramètre sera automatiquement sélectionné ; bien entendu, cette valeur peut être écrasé en faisant une nouvelle sélection
Méthode : Programmation ESP32
from machine import ADC, Pin # il faut déclarer la broche et un fonctionnement analogique
from time import sleep # déclaration des temporisations
pot = ADC(Pin(34)) # config sur ESP32 d'objet ADC sur la broche 34
# pour un ESP32 la ligne suivante permet de mesurer jusqu'à 3.3V sinon la tension max sera de 1Vpot.atten(ADC.ATTN_11DB)
#pourpipico#pot = ADC(2) # config sur pipico d'objet ADC sur la broche A2while True:
mesure = pot.read() # conversion analogique-numérique 0-4095 avec un ESP32
# mesure = pot.read_u16() # conversion analogique-numérique 0-4095 avec un pipicoprint(mesure,2000,) # affichage sur la console de la valeur numérique sur pipico
sleep(1) # attente d'une seconde