
Analyse de l'écart et hypothèses
Méthode :
Identifier l'écart entre la performance simulée et celle mesurée, pour un réglage donné du système.
Identifier les différents maillons pouvant influer sur cette performance.
Mesurer sur le système réel les grandeurs de sortie de ces différents maillons (si mesurables).
Comparer au résultats de la simulation et identifier le maillon faible (présentant le plus d'écart ).
Pour ce maillon, rechercher la loi d'évolution sous forme d'équation ou de caractéristique de transfert graphique.
Identifier le paramètre présent dans la loi d'évolution dont l'incertitude est la plus grande.
Déterminer dans quel sens doit évoluer ce paramètre pour réduire l'écart défini.
Quantifier la variation à imposer au paramètre pour annuler l'écart.
Effectuer la modification.
Exemple : Chariot de golf
L'exemple proposé ici est assez représentatif de nombreux systèmes que l'on peut rencontrer en sciences de l'ingénieur, en particulier dans le cadre du projet : moteur, réducteur, conversion de mouvement, et enfin charge modélisée par analyse statique et dynamique.
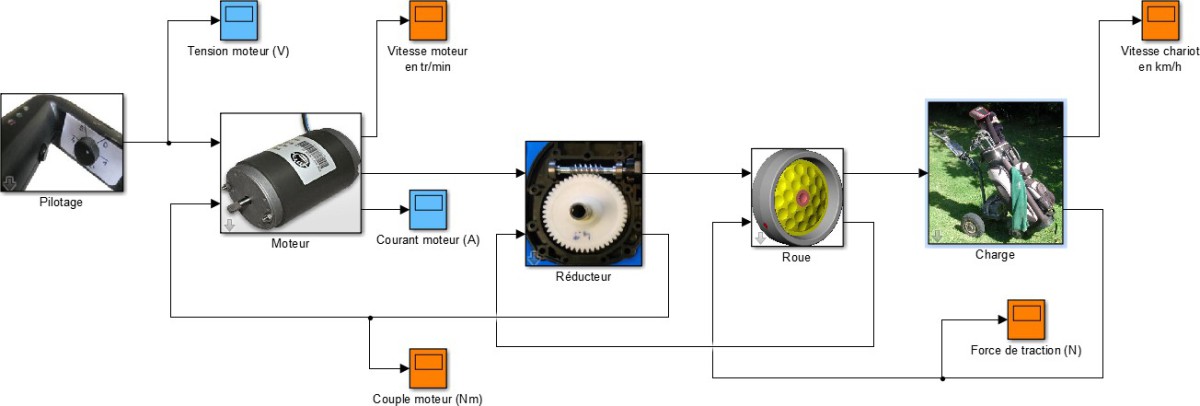
On souhaite que le modèle permette de déterminer la vitesse pour les différents réglages de tension et les différentes configurations de la charge.
La vitesse du chariot dépend de la vitesse du moteur. Chaque maillon peut introduire des erreurs : moteur, réducteur, roue ou charge.
On peut déterminer par des mesures la vitesse du chariot et la vitesse des roue (sortie du réducteur). Par contre la vitesse du moteur n'est pas directement mesurable mais peut être calculée puisqu'on connaît la valeur exacte du rapport de réduction.
Pour la vitesse, les sources d'erreur sont :
le moteur : 3 paramètres en régime permanent (K, R, Io) et l'inertie J pour le régime transitoire
la roue : risque d'erreur limitée car la mesure du diamètre est facile à faire avec une erreur maxi de 1 ou 2 mm, soit une erreur relative inférieure à 1%.
la charge : erreurs possibles sur le poids (masse), sur le facteur de roulement et sur la pente.
Modélisation du moteur
| 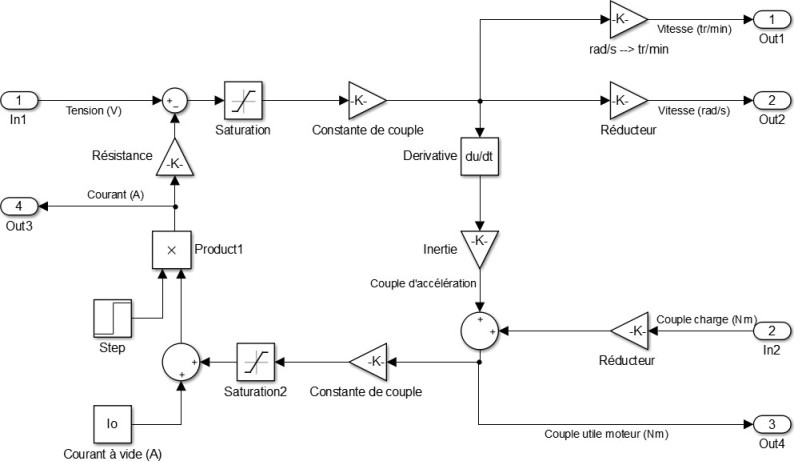 Modèle du moteur |
Modélisation de la charge
| 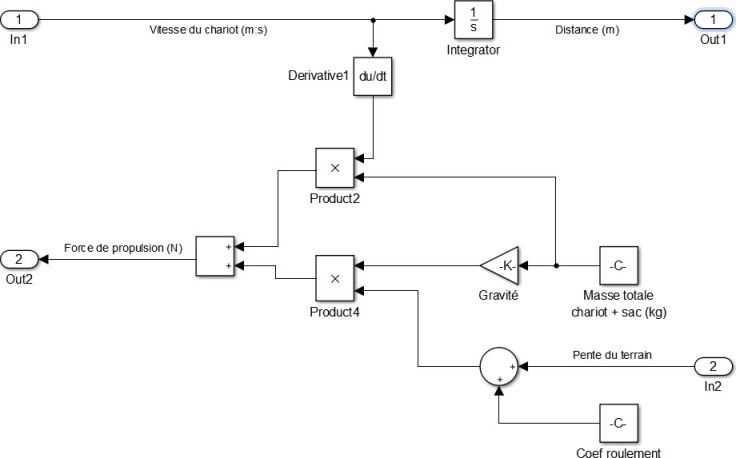 Modèle de la charge |
Modélisation de l'ensemble
Après avoir réglé le modèle du moteur et celui de la charge, on peut ajuster le rendement du réducteur (maillon faible, paramètre inconnu). Le diamètre de la roue et le rapport de réduction ont peu ou pas d'incertitude.




