10 Simplifications liées aux systèmes plans
Définition d'un système plan
Un système est supposé plan lorsqu'il existe un plan qui soit:
plan de symétrie géométrique
plan de symétrie des actions mécaniques
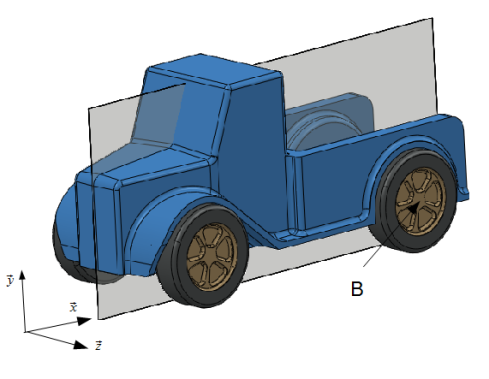
Exemple 1 : camion vide
le système est dit "plan". | 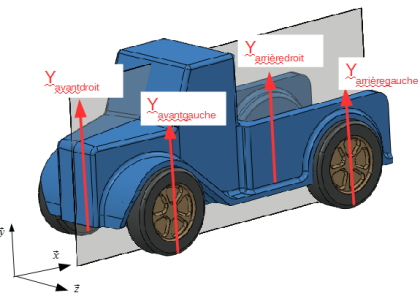 |

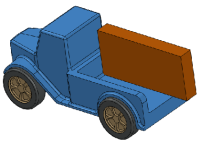
Exemple 2 : camion chargé d'un côté
le système n'est pas plan. | 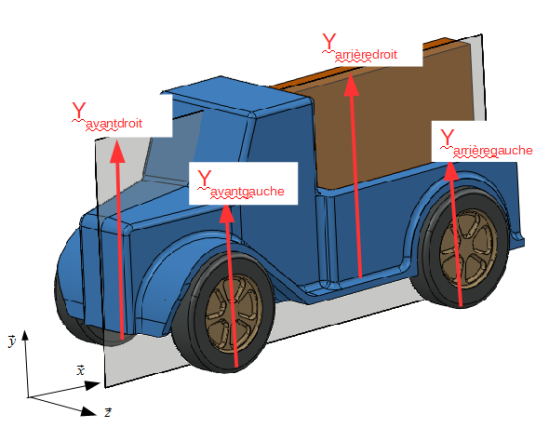 |
Propriétés utilisables dans un système plan
La résultante est contenu dans le plan (la composante perpendiculaire au plan est nulle).
Le moment est perpendiculaire au plan (les composantes contenues dans le plan sont nulles).
Exemple : Application à l'exemple 1
Dans cet exemple, le système est dit "plan" :
| |



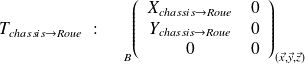
Modélisation de l'action transmissible par le châssis à la roue arrière gauche : Il s'agit d'une liaison pivot d'axe
La modélisation de l'action transmissible par la liaison donne :
L'utilisation des propriétés du système plan permet d'écrire :
|  |