
Modéliser le mouvement d'un point appartenant à un solide S
La modélisation du mouvement d'un solide se traduit par 3 équations horaires générales du mouvement selon la définition de l'accélération (nulle, constante ou variable). Les équations qui suivent, ne s'appliquent pas pour une accélération variable (dans ce cas, il faudra utiliser un logiciel de simulation).
Fondamental : Accélération nulle : a(t) = 0
Équations horaires générales du mouvement uniforme (MU) :
a(t) = 0
v(t) = constante = vi
p(t) = vi . ( t - ti ) + pi
où ti, vi et pi sont les conditions initiales (ce sont des constantes à déterminer).
Allures des courbes caractéristiques des équations horaires : |  |
Fondamental : Accélération constante : a(t) = constante
Équations horaires générales du mouvement uniformément varié (MUV) :
a(t) = constante = ai
v(t) = ai . ( t - ti ) + vi
p(t) = 0,5 . ai . ( t - ti )2 + vi . ( t - ti ) + pi
où ti, ai, vi et pi sont les conditions initiales (ce sont des constantes à déterminer).
Allures des courbes caractéristiques des équations horaires : | 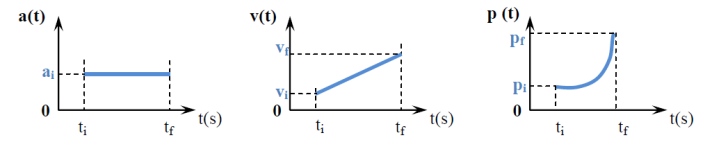 |
D'autres exemples...
avec variation sinusoïdale :
|  |
avec variation quelconque :
|  |




